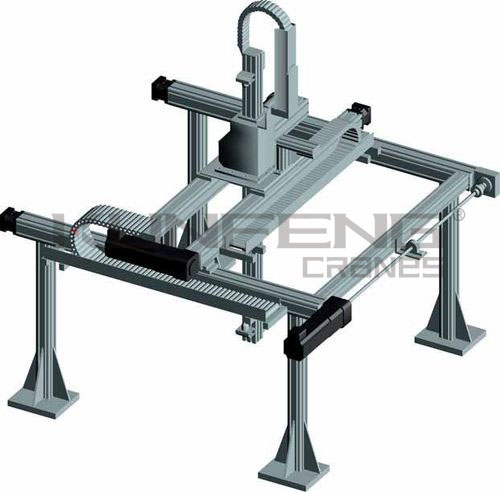
The truss manipulator is composed of six parts: a structural frame, X-axis components, Y-axis components, Z-axis components, fixtures and control cabinets.
Features
1. High efficiency---The axes run linearly at extremely high speeds, which can be quickly responded by servo motors;
2. Stability-------Minimal repeatability error, up to 0.03mm in height;
3. High intensity ------ 7x24 hours work;
4. High precision ------ the positioning accuracy can reach 0.02mm;
5. High cost performance ------ Compared with the joint robot, its load weight is larger and the coverage area is larger;
6. Simple operation ------ Based on the Cartesian coordinate system, its motion parameters are relatively simple.